1. Caractéristiques techniques demoteur eVTOL
In électricité distribuéeLa propulsion est assurée par des moteurs entraînant plusieurs hélices ou ventilateurs situés sur les ailes ou le fuselage, formant ainsi un système de propulsion qui fournit la poussée à l'aéronef. La densité de puissance du moteur influe directement sur la capacité d'emport de l'aéronef. La puissance de sortie, la fiabilité et l'adaptabilité environnementale du moteur sont des facteurs déterminants pour les caractéristiques dynamiques et la sécurité de l'aéronef à propulsion électrique. Le choix des moteurs pour véhicules électriques, drones et eVTOL varie en fonction des coûts, des applications et d'autres facteurs [1].

(Source photo : Site officiel de Network/Safran)
1) véhicules électriques: aimant plus permanentmoteurs synchrones,Les moteurs à aimants permanents, grâce à leur rendement et leur couple supérieurs, offrent une meilleure expérience de conduite. De plus, leur forte densité de puissance permet aux véhicules électriques de développer une puissance accrue à volume égal.
(2) UAV : couramment utilisé sans balaisMoteur à courant continu.Le moteur à courant continu sans balais présente un poids et un niveau sonore réduits, ainsi qu'un faible coût d'entretien, ce qui le rend adapté aux exigences de vol des drones. De plus, sa vitesse élevée le rend idéal pour les vols à grande vitesse. DJI, par exemple, utilise des moteurs sans balais.
(3) eVTOL : Les exigences élevées en matière de rendement et de densité de couple font du moteur synchrone à aimant permanent une solution très prometteuse pour les systèmes de propulsion électrique. En effet, le moteur à flux axial à aimant permanent offre un taux d’utilisation élevé de l’espace radial, et sa densité de puissance et de couple est avantageuse pour un faible rapport longueur/diamètre. Les aéronefs eVTOL actuels, tels que le Joby S4 et l’Archer Midnight, utilisent tous des moteurs synchrones à aimant permanent [1].
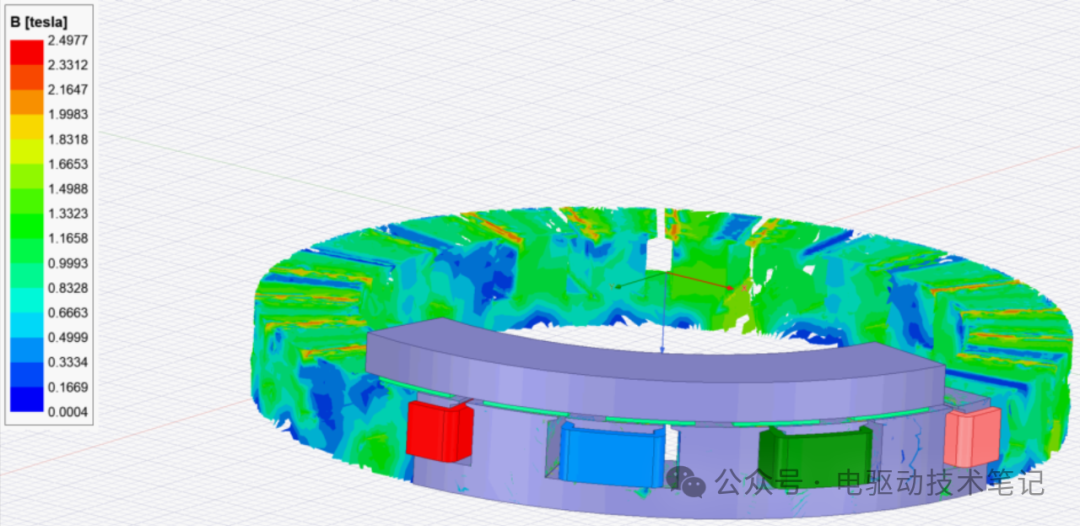
La figure suivante illustre l'image nuageuse de l'intensité d'induction magnétique du rotor fixe d'un moteur à flux axial mono-stator et mono-rotor
La figure suivante compare les paramètres des moteurs d'avions électriques et de véhicules électriques

2. Tendances de développement des moteurs eVTOL
Actuellement, la principale tendance en matière de développement des systèmes de propulsion eVTOL consiste à réduire le poids de la structure du moteur et celui du système de refroidissement grâce à l'amélioration des technologies de conception électromagnétique, de gestion thermique et d'allègement. L'objectif est également d'accroître constamment la densité de puissance du moteur et sa capacité de sortie dans une large gamme de conditions. Selon le document « Recherche et développement des véhicules volants et technologies clés », le moteur de propulsion aéronautique a atteint une densité de puissance nominale supérieure à 5 kW/kg grâce à l'utilisation de matériaux isolants à haute température de fonctionnement, d'aimants permanents à haute densité d'énergie magnétique et de matériaux structurels plus légers. En optimisant la conception électromagnétique du moteur, notamment par l'utilisation de réseaux magnétiques de Halbach, de structures sans noyau de fer et d'enroulements de fil de Litz, et en améliorant la dissipation thermique, on prévoit que la densité de puissance nominale du moteur atteindra 10 kW/kg en 2030 et dépassera les 13 kW/kg en 2035 [1].

3. Comparaison des itinéraires purement électriques et hybrides
Comparativement aux solutions 100 % électriques et hybrides, le projet eVTOL chinois, parmi les constructeurs actuels, repose principalement sur une propulsion 100 % électrique, limitée par la densité énergétique des batteries lithium-ion. Les eVTOL à faible capacité de transport de passagers constituent le domaine d'application privilégié de cette technologie. À l'étranger, certains constructeurs ont anticipé l'adoption de la propulsion hybride et ont mené de nombreux essais et itérations. Comme le montre le tableau ci-dessous, la solution hybride offre une autonomie nettement supérieure et permettra, à l'avenir, de couvrir un plus large éventail d'applications, notamment pour les vols moyen-longs et à basse altitude [1].
Date de publication : 27 février 2025